
Фёдора заменит Марфа: российского антропоморфного робота протестировали космонавты
Российские космонавты Анна Кикина и Дмитрий Петелин стали участниками программы по апробации методики совместной операторской деятельности космонавтов по применению антропоморфного робота совмещенного с мобильной платформой. Об этом говорится на сайте Научно-исследовательского испытательного центра подготовки космонавтов имени Ю. А. Гагарина.

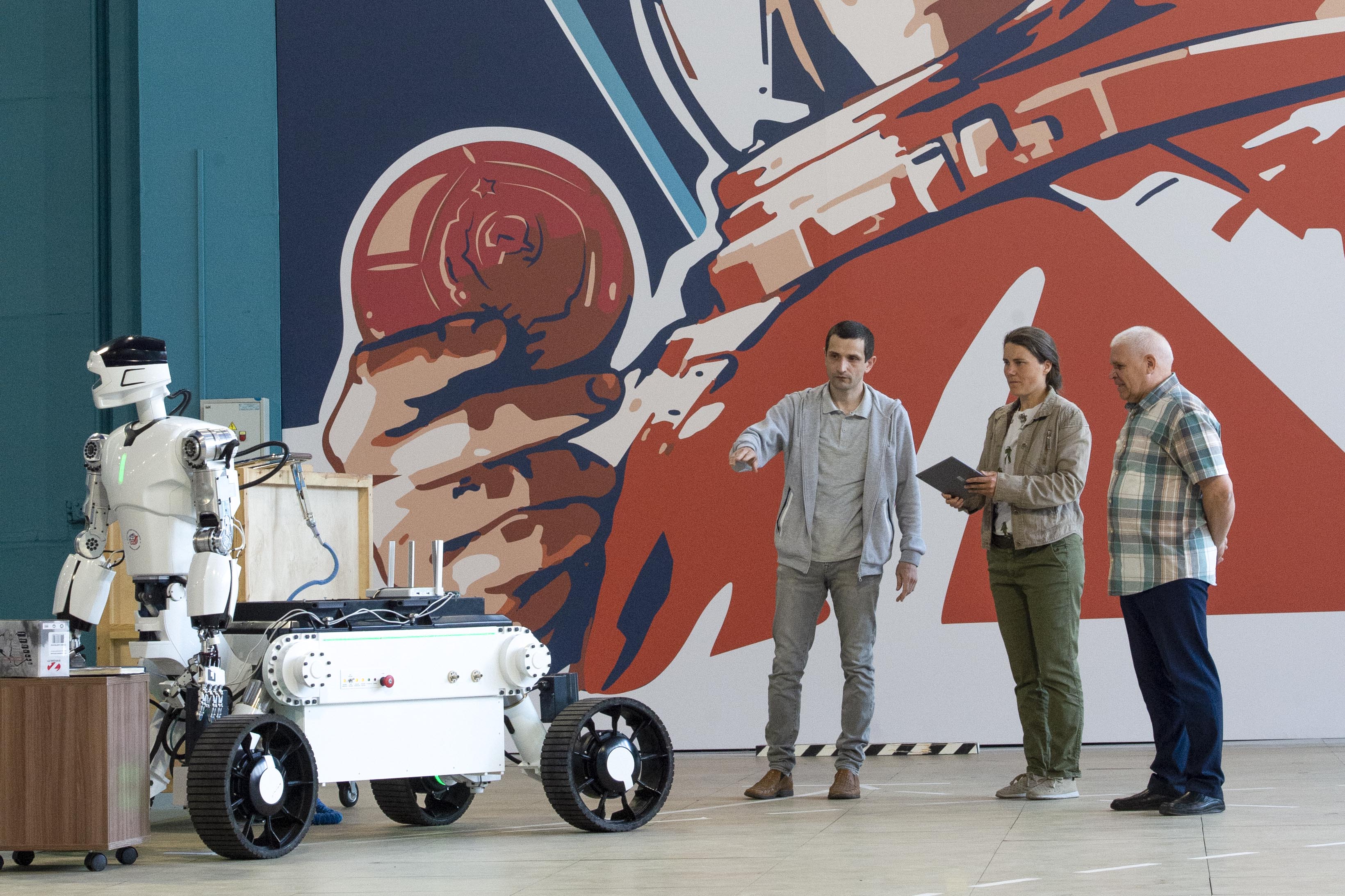
В рамках программы космонавты «сотрудничали» с мобильным антропоморфным роботом по имени Марфа, которого можно назвать прямым последователем Фёдора. С последним в 2019 году проводился эксперимент под названием «Испытатель» на борту МКС. После возвращения Фёдора на Землю с ним был проведён ряд испытаний, которые были нацелены на модернизацию существующей конструкции и управляющей платформы.


Результаты этих работы были учтены при разработке Марфы. Существующая версия робота теоретически может работать на поверхности Луны, например, собирать грунт. Роботизированные руки смогут удержать 5 килограммов грунта (на Луне), что означает 30 килограммов на поверхности нашей планеты. Работает Марфа от батарей, полного заряда которых хватает на 2,5 часа. Разработчики сообщают, если робот отправится на Луну, он будет использовать более мощные источники энергии, позволяющие функционировать в режиме 24/7.
«Марфы есть несколько режимов управления. Робот может действовать автоматически, но в случае нештатных ситуаций космонавт управляет им вручную. Для этого оператору необходимо надеть ЗУКТ и работать с помощью планшета. Кроме того, существует супервизорный режим управления: то есть Марфа самостоятельно подъезжает к объекту по заранее заданной программе, распознаёт (на опытной площадке) кнопки или тумблеры и нажимает на них, выполняя определённые действия. Также как и положено антропоморфному существу, робот реагирует на голос: получив команду, он едет её выполнять», — рассказал Владимир Дикарев, начальник управления научно-прикладных исследований проблем подготовки космонавтов.
Управление Марфой осуществляются с помощью задающего устройства копирующего типа (ЗУКТ), когда происходит взаимодействие между роботизированными руками и экзоскелетом, в котором находится космонавт.

«Особенность нынешней апробации заключалась в том, что работали два оператора: один управлял мобильной платформой, другой через устройство копирующего типа – антропоморфным роботом», — пояснила Анна Кикина.
В рамках тестов Марфа должна была подъехать к макету системы управления, забрать имитацию научного оборудования, поместить его на грузовой платформы и транспортировать до определённой точки.